Gyroscope
API_LEVEL
3.0开始支持,API 兼容性请参考 API_LEVEL。
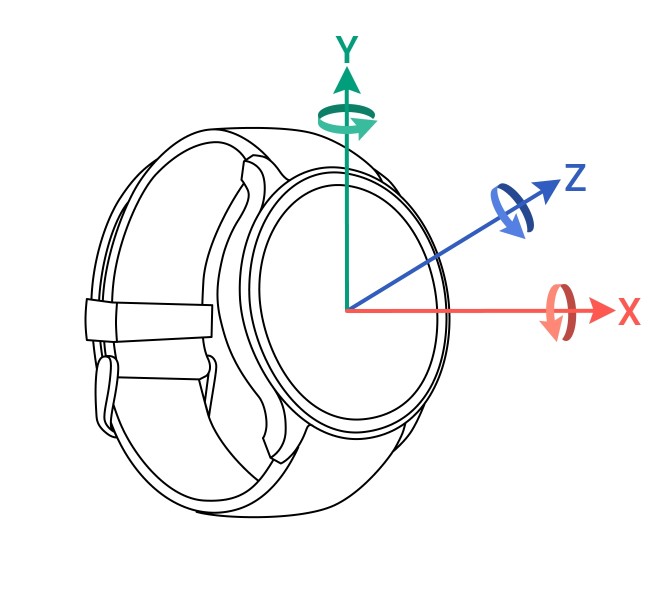
陀螺仪。测量设备沿三个正交轴(x,y,z)旋转的角速度,x、y 轴与屏幕平行,正方向参考图示,z 轴垂直于设备的屏幕,正方向指向上方,旋转角速度的方向使用右手定则来确定,图示旋转箭头方向为正方向。
信息
权限代码: device:os.gyroscope
方法
start
开始监听陀螺仪数据
start(): void
stop
停止监听陀螺仪数据
stop(): void
getCurrent
获取当前陀螺仪数据
getCurrent(): Result
Result
| 属性 | 类型 | 说明 | API_LEVEL |
|---|---|---|---|
| x | number | x 轴的角速度,单位 DPS,度数/秒 | 3.0 |
| y | number | y 轴的角速度,单位 DPS,度数/秒 | 3.0 |
| z | number | z 轴的角速度,单位 DPS,度数/秒 | 3.0 |
onChange
注册陀螺仪数据变化事件监听回调函数
onChange(callback: () => void): void
offChange
取消陀螺仪数据变化事件监听回调函数
offChange(callback: () => void): void
setFreqMode
API_LEVEL
3.0
设置触发频率的模式,mode 值参考频率模式常量
setFreqMode(mode: number): void
常量
频率模式
| 常量 | 说明 | API_LEVEL |
|---|---|---|
FREQ_MODE_LOW | 低功耗模式,触发频率低 | 3.0 |
FREQ_MODE_NORMAL | 正常功耗模式,触发频率中等 | 3.0 |
FREQ_MODE_HIGH | 高功耗模式,触发频率高 | 3.0 |
getFreqMode
API_LEVEL
3.0
获取触发频率模式,结果值参考频率模式常量
getFreqMode(): number
常量
频率模式
| 常量 | 说明 | API_LEVEL |
|---|---|---|
FREQ_MODE_LOW | 低功耗模式,触发频率低 | 3.0 |
FREQ_MODE_NORMAL | 正常功耗模式,触发频率中等 | 3.0 |
FREQ_MODE_HIGH | 高功耗模式,触发频率高 | 3.0 |
代码示例
import { Gyroscope, FREQ_MODE_LOW } from '@zos/sensor'
const gyroscope = new Gyroscope()
const callback = () => {
console.log(gyroscope.getCurrent())
}
gyroscope.onChange(callback)
gyroscope.setFreqMode(FREQ_MODE_LOW)
gyroscope.start()
// When not needed for use
gyroscope.offChange()
gyroscope.stop()